
QU'EST-CE QU'UN MOTEUR OUTRUNNER ?
MOTEURS COUPLE OUTRUNNER ET INRUNNER
Il existe deux types d'entraînement direct moteurs couple sans cadre: l'outrunner et le inrunner moteurs couple. Dans le cas d'un moteur inrunner, le rotor est situé à l'intérieur du stator. Dans le cas du moteur à roue libre, le rotor est situé à l'extérieur du stator.
Les moteurs Outrunner produisent plus de couple pour le même volume de construction par rapport aux moteurs Inrunner. Magnetic Innovations est spécialisée dans la typologie outrunner. Mais les deux types de moteurs couple, chacun avec leurs propres avantages, fonctionnent toujours de la même manière.
DIFFÉRENCES ENTRE LE MOTEUR OUTRUNNER ET LE MOTEUR INRUNNER
Un avantage d'un moteur à roue libre par rapport à un moteur à roue libre est que la surface de l'entrefer est nettement plus grande. En d’autres termes, la surface parcourue par les lignes de champ électromagnétique du rotor au stator est beaucoup plus grande. De cette façon, davantage de force électromécanique est générée.
De plus, le bras de couple est plus long pour un moteur à roue libre, car la force est générée plus loin du centre de rotation. Par conséquent, une plus grande surface d’entrefer et un bras de couple plus long conduisent tous deux à un couple plus élevé. Par conséquent, les moteurs outrunner peuvent atteindre des niveaux de couple beaucoup plus élevés que les moteurs inrunner avec le même volume de construction.
Pour compenser le couple inférieur, les moteurs Inrunner sont souvent équipés de transmissions ou de boîtes de vitesses. Mais l’ajout de ces mécanismes entraîne un volume de construction et des pertes mécaniques encore plus élevés. De plus, cela nécessite plus de maintenance, augmente le risque de contamination (huile, graisse) et conduit à une moindre précision. Ainsi, lorsque le volume de construction est limité et que des niveaux de couple élevés sont requis, les moteurs à roue libre constituent la meilleure option.
Différences clés – moteur Inrunner sans balais et moteur Outrunner
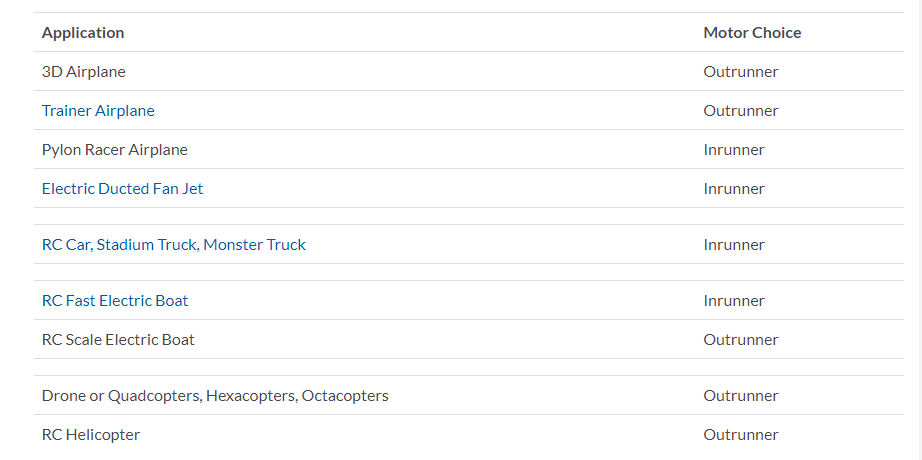
Jetez un œil à l’image ci-dessous. Vous pouvez voir que le moteur à roue libre sans balais a l'arbre de sortie, relié à une hélice dans ce cas fixée au boîtier du moteur. Cela suggère que l'arbre du moteur, lorsqu'il tourne, ferait également tourner le boîtier extérieur du moteur. C'est exactement ce qui se passe. Les aimants permanents du rotor sont placés sur le rotor et le rotor tourne sur le boîtier extérieur. A l’intérieur du moteur se trouvent les enroulements du stator qui ne tournent pas, ils sont fixes.
Sur le moteur inrunner, vous avez essentiellement le contraire de la façon dont il est construit. Sur le côté extérieur du moteur se trouve le boîtier. Le boîtier dans cette situation ne tourne pas et est fixe. Les bobinages du stator sont placés sur la face intérieure du boîtier. Lorsque vous faites tourner l'arbre du moteur d'un moteur inrunner, vous faites tourner le rotor qui contient également les aimants permanents, un peu comme le moteur outrunner. La différence étant bien entendu qu’ils sont désormais au centre du moteur. Pour la plupart, il s’agira du type de moteur électrique le plus conventionnel, surtout si vous êtes familier avec les gros moteurs à courant alternatif ou même les vieux moteurs à courant continu à balais.
Différences de performances – moteur Inrunner sans balais et moteur Outrunner
Cela peut être facilement débattu quant au moteur qui offre les meilleures performances lorsque vous plongez en profondeur dans les détails. Pour plus de simplicité, considérons vaguement des moteurs de taille et de poids égaux afin de comparer les différences de performances possibles.
Différences de taille physique
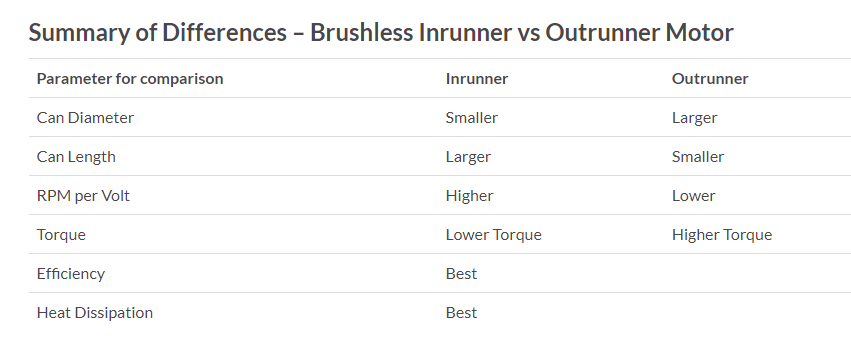
De manière générale, les moteurs à rotor sans balais auront un diamètre plus grand et une longueur plus petite par rapport à un moteur à rotor comparable de poids similaires. À l’inverse, les Inrunners ont un diamètre plus petit et généralement une longueur plus grande. La taille physique est un domaine dans lequel votre application peut être limitée, mais il existe d'autres compromis qui devraient être pris en compte, comme nous le verrons ci-dessous.
RPM / Volts (Kv)
Lorsque vous considérez le régime par volt d'un moteur sans balais (vitesse de rotation par volt appliqué), c'est l'un des facteurs les plus importants dans le choix du moteur adapté à votre application. Souvent, lorsque l'on ne sélectionne pas correctement le moteur Kv approprié, le risque de brûler un composant du système électrique est considérablement accru. Un moteur inrunner de taille égale à un moteur outrunner sans balais aura un Kv plus élevé. Bien que différentes sélections de vent de moteur (moteur de même taille avec options Kv) offrent une plage décente, les moteurs à rotor auront généralement une valeur Kv inférieure. Ceci est essentiel dans votre sélection d’un moteur sans balais adapté directement à votre application.
Comment un outrunner produit-il un Kv inférieur ? Eh bien, nous avons déjà parlé de différence de taille physique. La taille physique représente un facteur principal qui affecte le kv. Le plus grand diamètre de la boîte extérieure permet d'utiliser une plus grande quantité d'aimants dans le boîtier extérieur. Un plus grand nombre d'aimants alternant les pôles magnétiques obligent l'ESC à commuter plus rapidement, ce qui ralentit la vitesse globale car il y a plus de travail à effectuer par l'ESC. Vous pouvez également le regarder plus simplement, car le diamètre plus grand crée une circonférence plus grande pour que le moteur puisse se déplacer en une seule rotation. Le plus grand diamètre de boîte représente également un bras de moment plus grand pour un outrunner, ce qui constitue une bonne transition vers le sujet suivant.
Comparaison du couple d'un moteur Outrunner sans balais et d'un moteur Inrunner
Le bras de moment plus grand dont nous avons parlé ci-dessus se convertit directement en plus de couple créé. Par conséquent, le moteur sans balais générera plus de couple en comparaison générale avec un moteur inrunner. La relation est liée au fait que les outrunners ont un régime par volt inférieur. La relation avec le Kv et le couple est inversement proportionnelle. À mesure que le régime par volt (Kv) augmente, le couple du moteur diminue.
envoyer une demande



X
Nous utilisons des cookies pour vous offrir une meilleure expérience de navigation, analyser le trafic du site et personnaliser le contenu. En utilisant ce site, vous acceptez notre utilisation des cookies.
politique de confidentialité